Navigation sur maillage 3D
Navigation sur maillage 3D


Navigation autonome sur maillage 3D pour robots
Nature Robots est spécialisée dans la navigation autonome de robots en terrains semi-structurés et non structurés, loin des routes goudronnées.
Grâce à des algorithmes de planification géodésique de trajectoire et des champs vectoriels développés par Nature Robots, les robots et machines peuvent naviguer de manière autonome vers des positions cibles définies dans des champs, prairies ou forêts.
À partir d’un modèle de surface 3D de l’environnement, la franchissabilité est calculée de manière ciblée et spécifique à chaque robot, afin de lui permettre de se déplacer en toute sécurité entre les obstacles, en suivant le chemin le plus court à travers le champ vectoriel généré.
Au cours de ce processus, le robot se localise avec une précision centimétrique dans la carte connue, en utilisant des techniques avancées de ray tracing, sans recourir au GPS ou au RTK.
Combiné à des méthodes d’estimation de position (odométrie et odométrie visuelle), le robot maintient une localisation précise dans le modèle de surface 3D pendant tout son déplacement, ce qui lui permet de suivre le champ vectoriel ou la trajectoire calculée, et de planifier et exécuter des actions adaptées à l’environnement.
La planification et le contrôle basés sur les champs vectoriels sur des modèles de surface 3D permettent une navigation sûre dans des environnements pentus ou multi-niveaux, comme des pentes aux formes irrégulières, des tunnels, ou le long de murs et plafonds, à condition que le robot dispose des actionneurs nécessaires.
Avec des approches classiques de planification sur grille 2D, de tels scénarios sont soit impossibles, soit extrêmement complexes à gérer.
Notre approche permet de calculer des champs vectoriels de plus court chemin dans des environnements extérieurs complexes, en une seule planification complète, en moins d’une seconde.
En résumé, la navigation autonome sur maillage 3D offre les fonctionnalités clés suivantes :
- Navigation planifiée pour robots en terrains accidentés, semi-structurés et non structurés : champs, prairies, vignes ou forêts.
- Planification et guidage par champ vectoriel vers des cibles définies dans la carte de surface 3D, en tenant compte des obstacles et zones non franchissables.
- Planification performante et complète en environnements complexes à plusieurs niveaux, avec structures verticales ou en surplomb, en un seul calcul.
- Localisation et estimation de position haute précision dans le modèle 3D pour une navigation sécurisée et des actions localisées et spécifiques à l’environnement.
Navigation autonome sur maillage 3D en terrain difficile : nous avons développé une technologie disruptive de navigation par surface maillée, conçue pour une navigation universelle, notamment dans des environnements escarpés ou multi-niveaux comme les forêts ou les tunnels.

Navigation sur maillage en champ
Planification de trajectoire 3D sur maillage dans des champs agricoles.
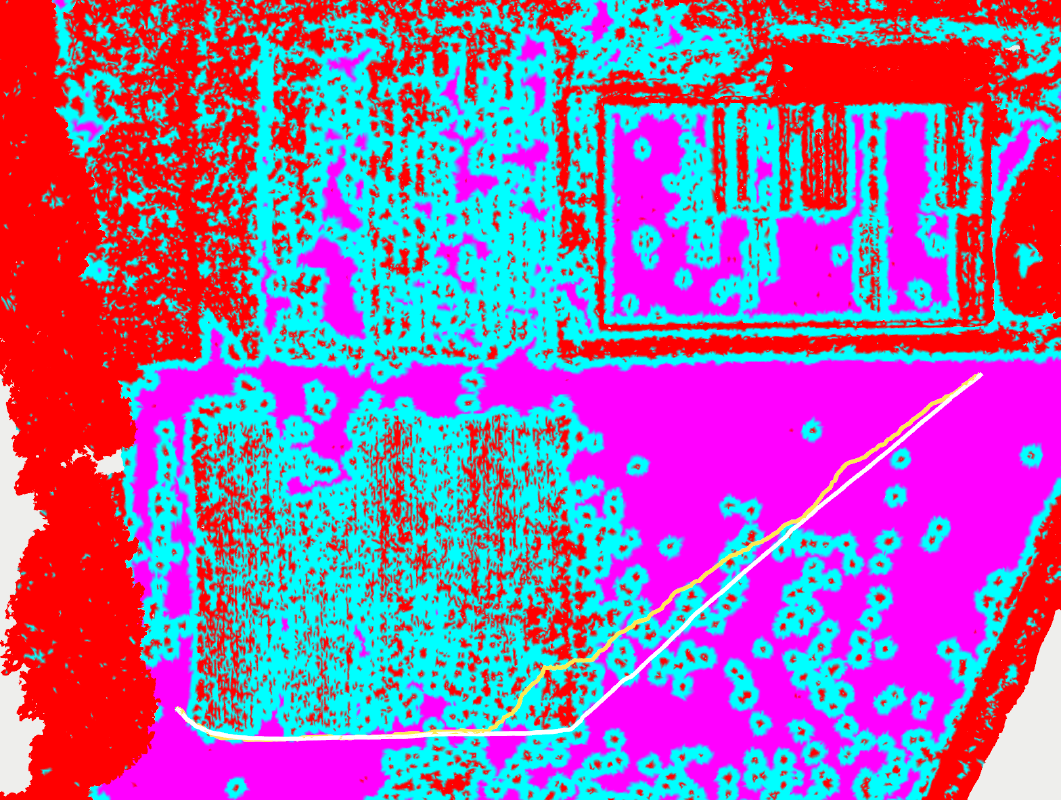
Estimation de franchissabilité
Évaluation de la capacité de franchissement du robot pour une navigation sécurisée.
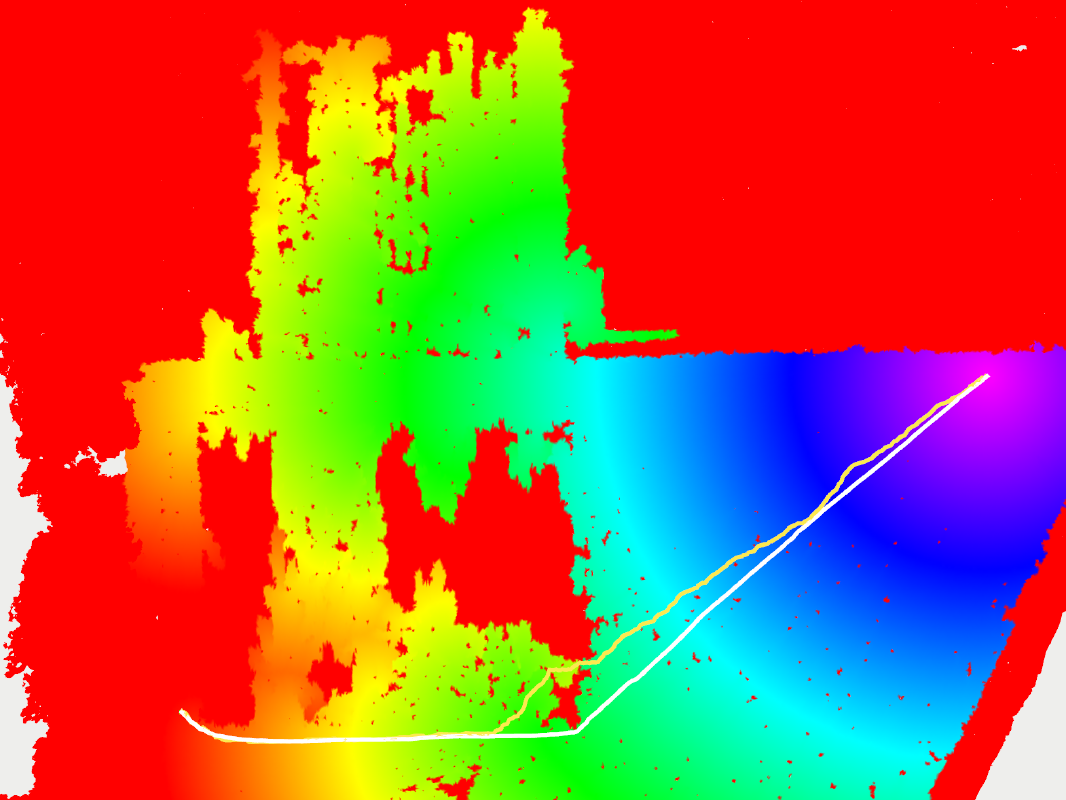
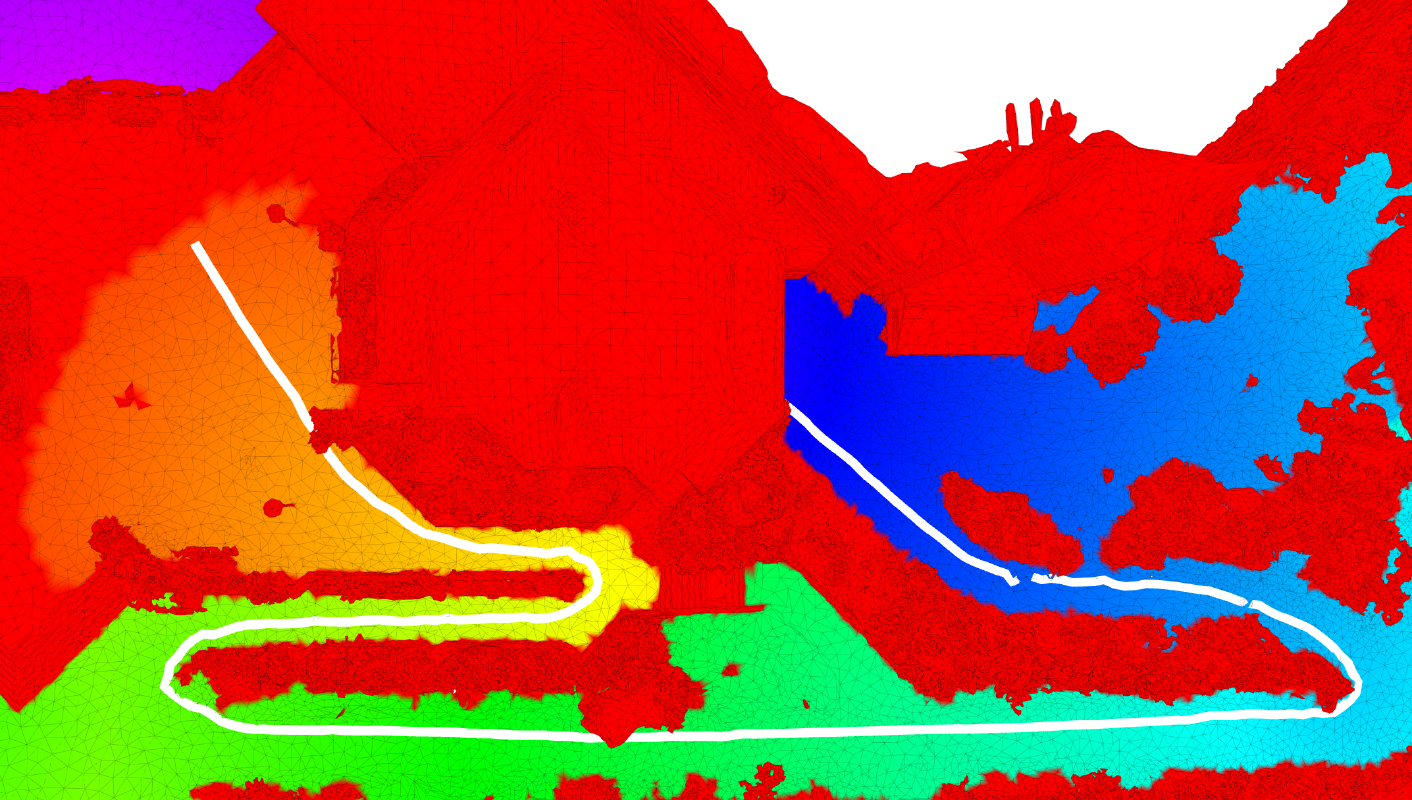
Calcul du champ de distances
Calcul métrique précis des distances jusqu’à la cible.
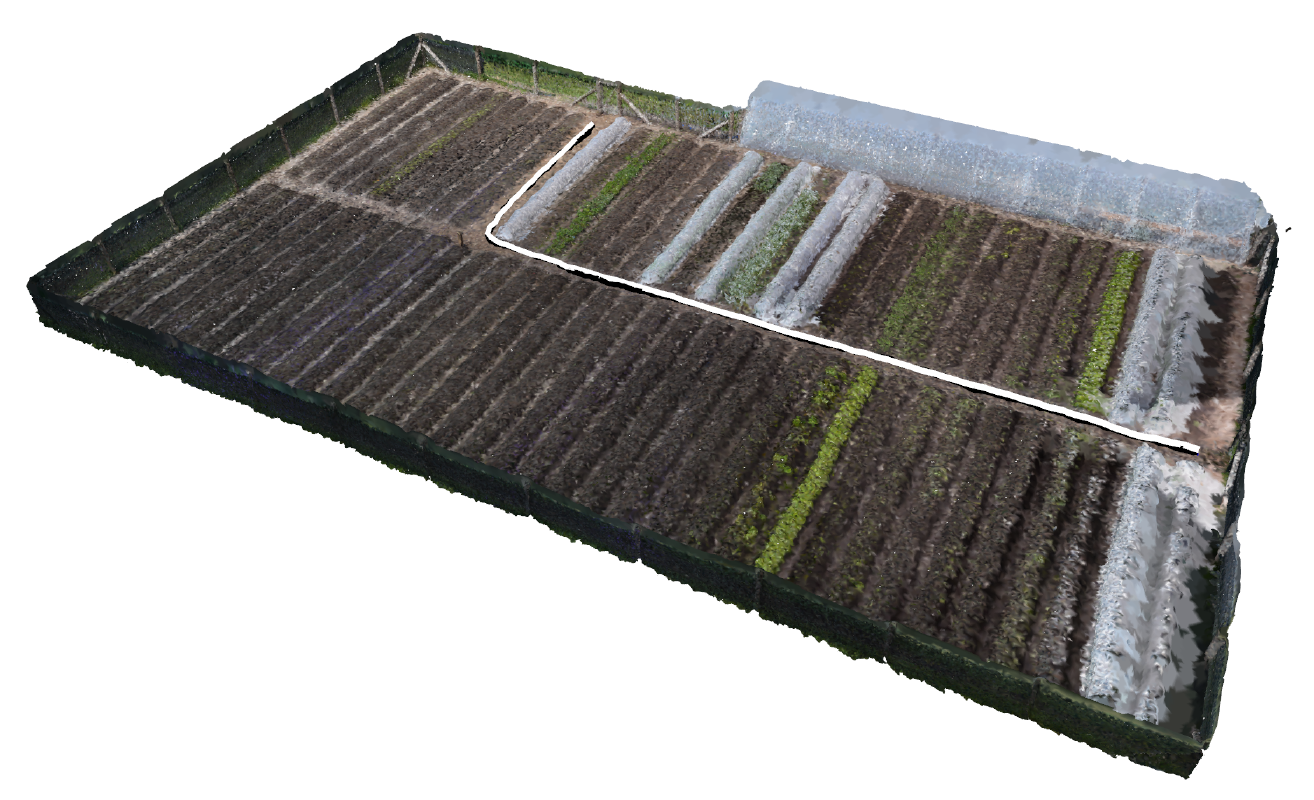
Navigation sur maillage en jardin maraîcher
Planification de trajectoire 3D sur maillage dans un jardin maraîcher.
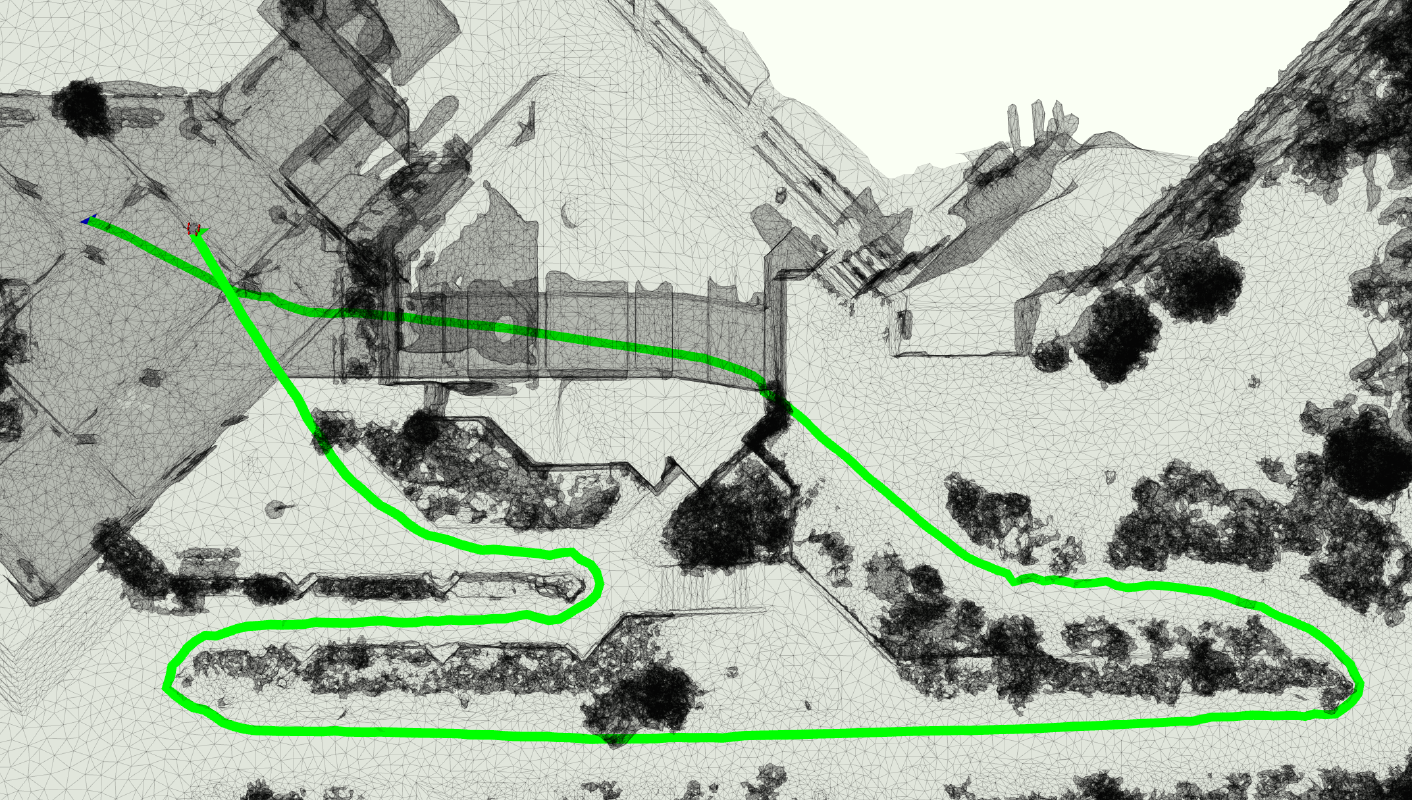
Planification multi-niveaux en milieu urbain
Navigation sur plusieurs niveaux via rampes et tunnels.
Calcul universel de distances
Calcul exact des distances dans des environnements 3D multi-niveaux.










