3D Mesh Navigation
3D Mesh Navigation


Autonomous Robots 3D Mesh Navigation
Nature Robots specializes in autonomous robot navigation in semi-structured and unstructured terrain away from paved roads. Using geodesic path planning and vector field approaches developed by Nature Robots, robots and machines can autonomously navigate to defined target positions in fields, meadows and forests. Based on a 3D environment surface model, traversability is derived in a targeted and robot-specific manner to safely navigate the robot between obstacles along the shortest path across the computed vector field.
In this process, the robot locates or localizes itself with centimeter accuracy in the known map using state-of-the-art ray tracing approaches, without relying on GPS or RTK. Combined with position estimation approaches (odometry and visual odometry), the robot is always accurately localized in the 3D surface model while moving and can thus follow the computed vector field or path and plan and execute environment-specific actions.
Vector field-based planning and control on 3D surface models allows safe navigation in steep, as well as multi-layered environments, such as over arbitrarily shaped ramps, through tunnels, along walls and ceilings - as long as the robot has the necessary actuators for each. With conventional 2D raster planning approaches, this is not possible, or only with considerable effort. Our vector field-based approach allows to compute shortest path vector fields for complex outdoor environments with diverse structures and elements in only one planning run completely in less than one second.
In summary, autonomous 3D mesh navigation includes the following key features:
- Plan-based robot navigation for rough, semi-structured, and unstructured terrain, such as fields, meadows, vines, or forests.
- Vector field-based planning and steering to defined targets in the 3D surface map considering non-traversable obstacles and parts.
- Performant and complete planning in complex environments with multiple levels and vertical or overhanging structures in only one planning run.
- High-precision localization and position estimation in the 3D surface model for safe navigation and site-specific action planning and execution.
Autonomous 3D mesh navigation in rough terrain: We developed a new disrubtive surface mesh navigation technology made for universal navigation, e.g., in steep and multi-layered environments, such as in forests and through tunnels.
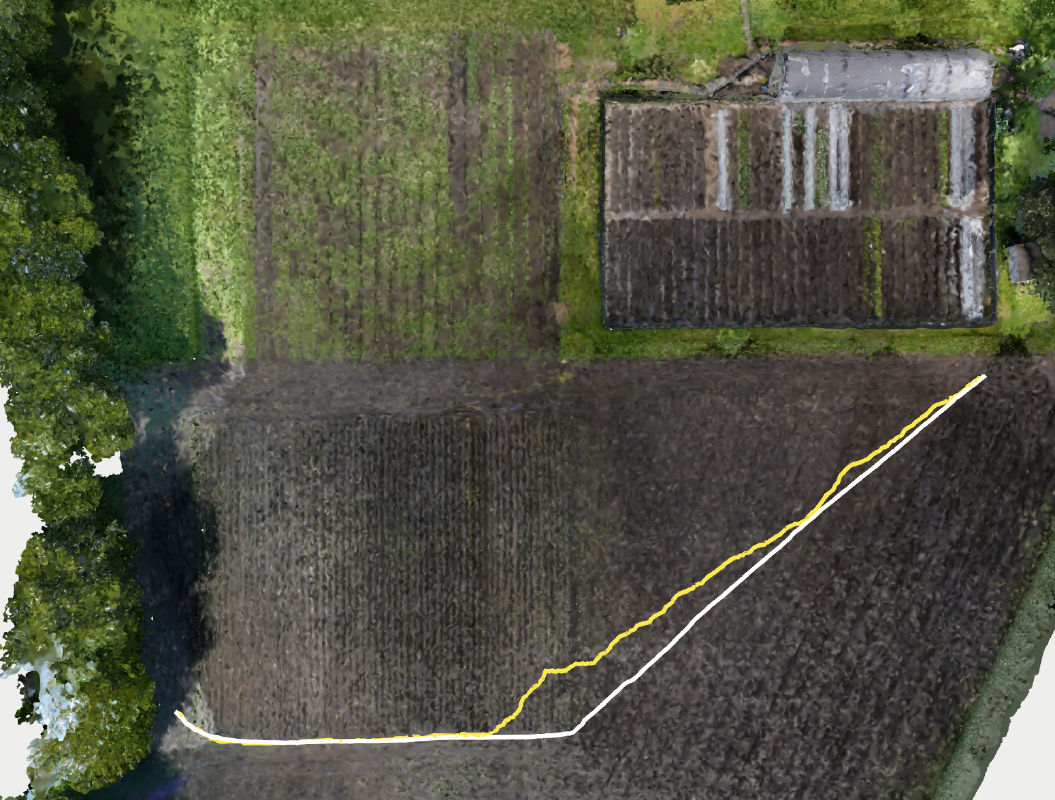
In Field Mesh Navigation
3D mesh path planning in agricultural fields.
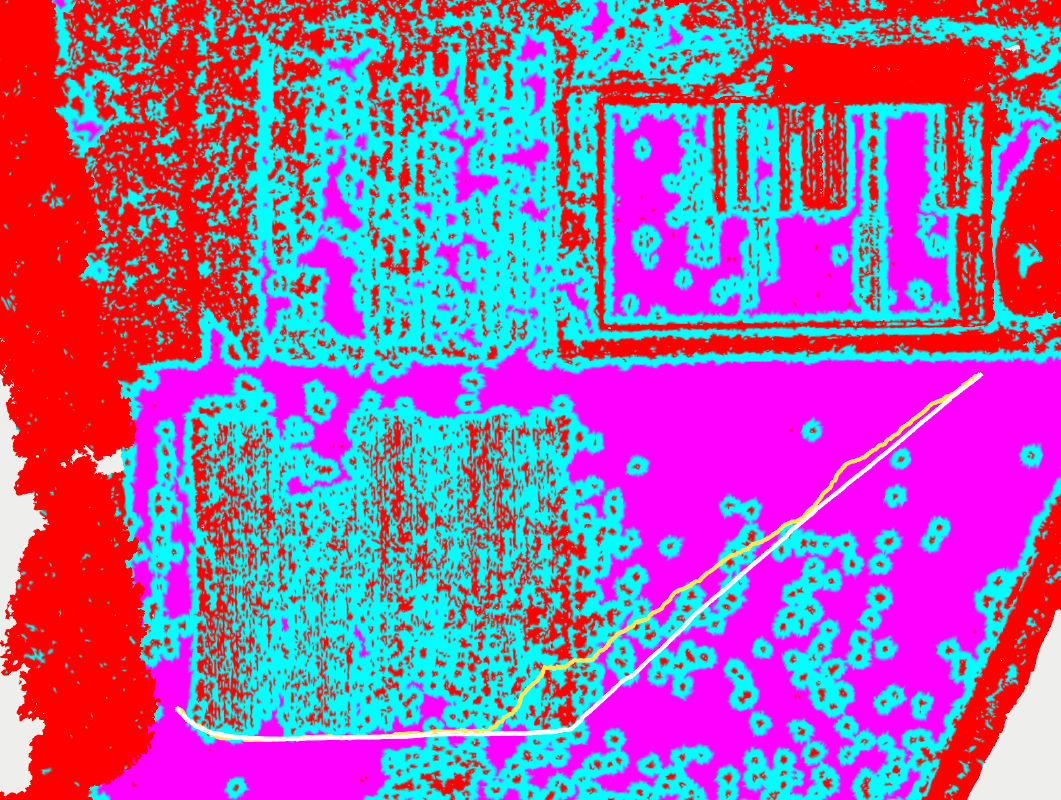
Drivability Estimation
Robot drivability estimation for save navigation.
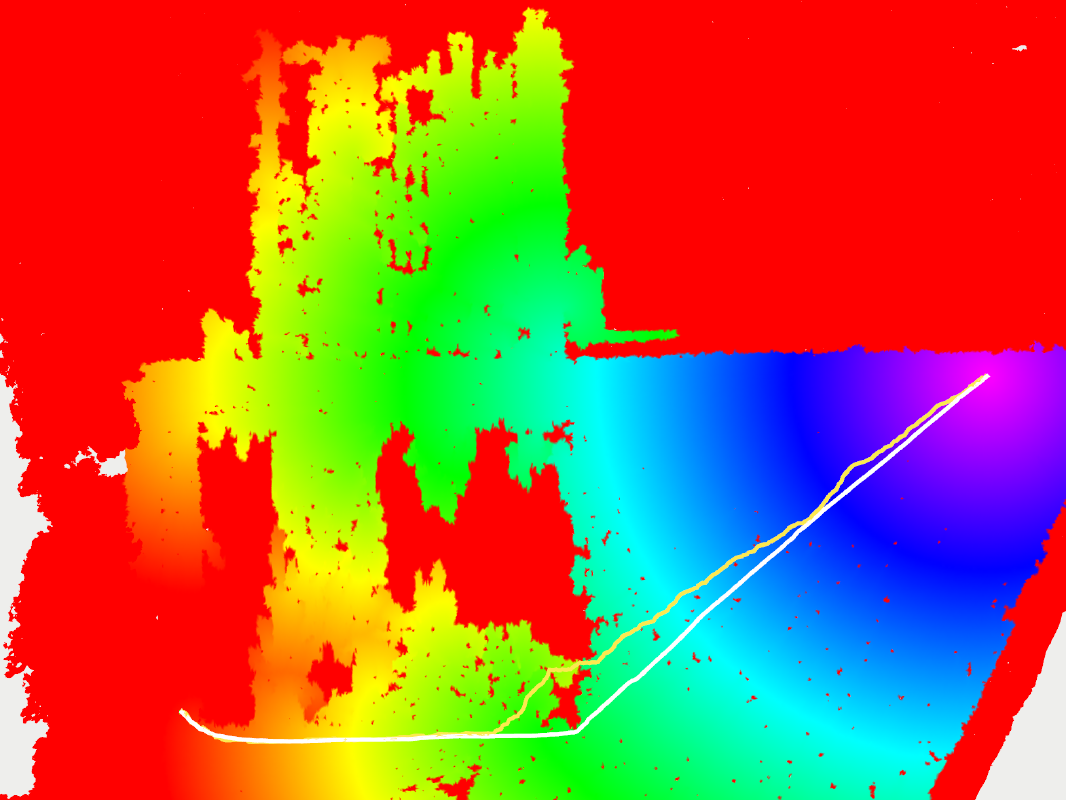
Distance Field Computation
Exact metric distance field computation to the goal.
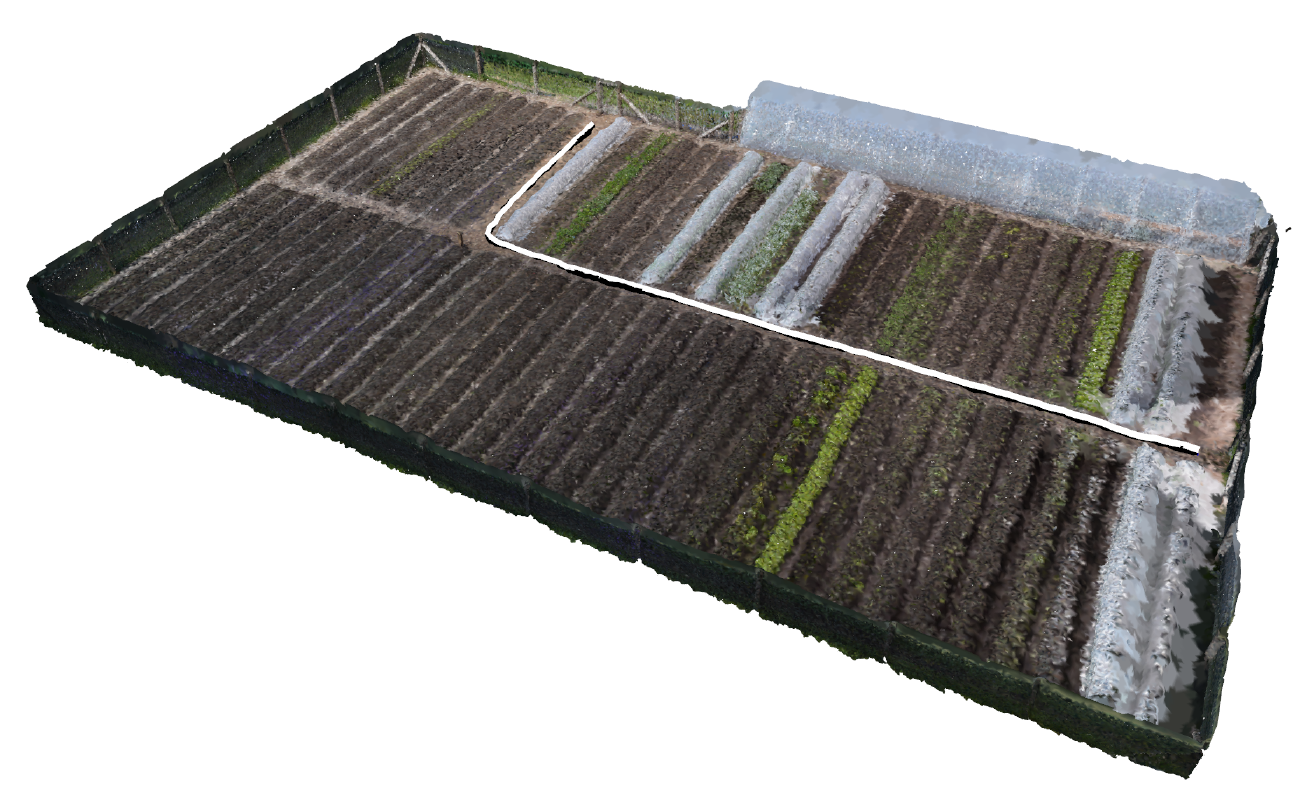
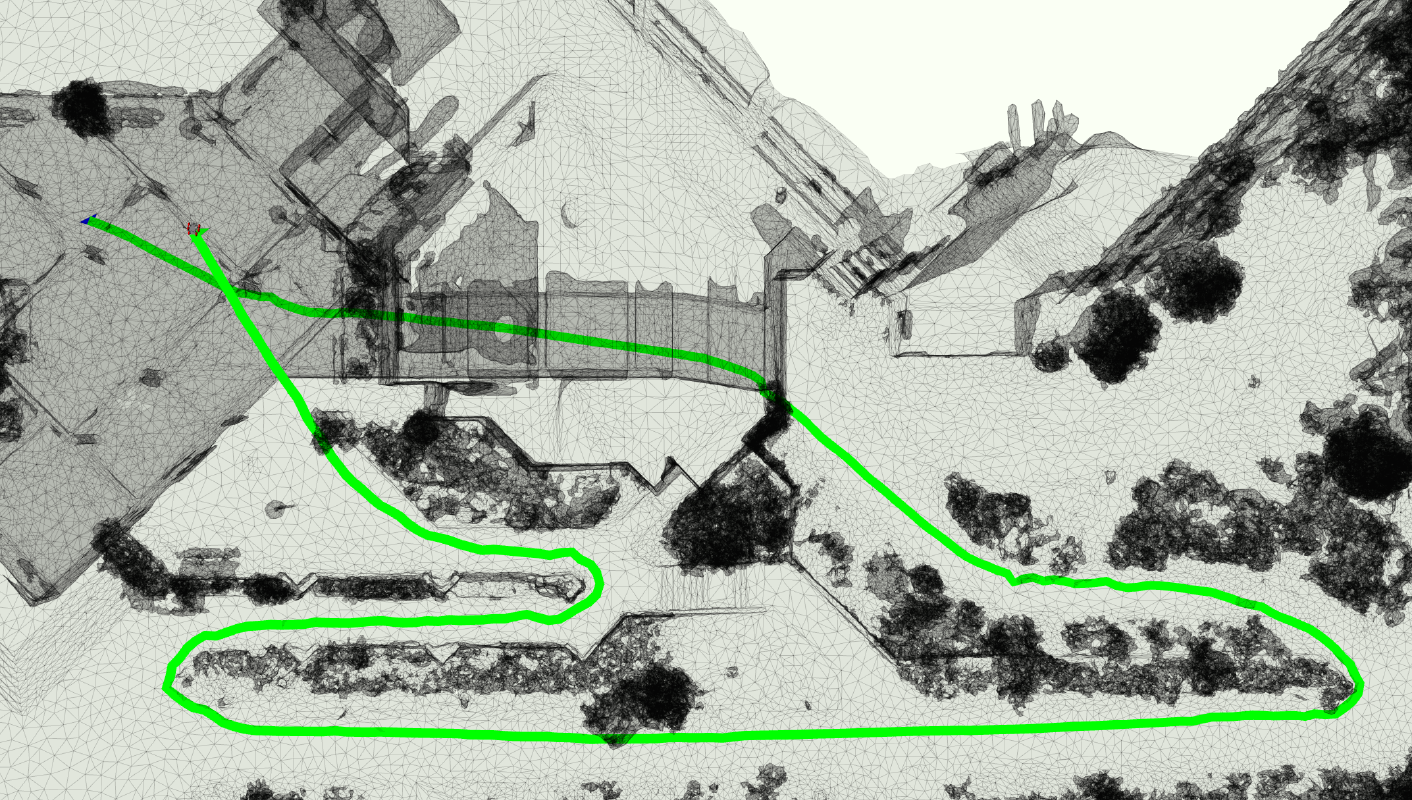
In Garden Mesh Navigation
3D mesh path planning in a market garden.
3D Urban Multi-Level Path Planning
Multi-level planning over ramps and through tunnels.
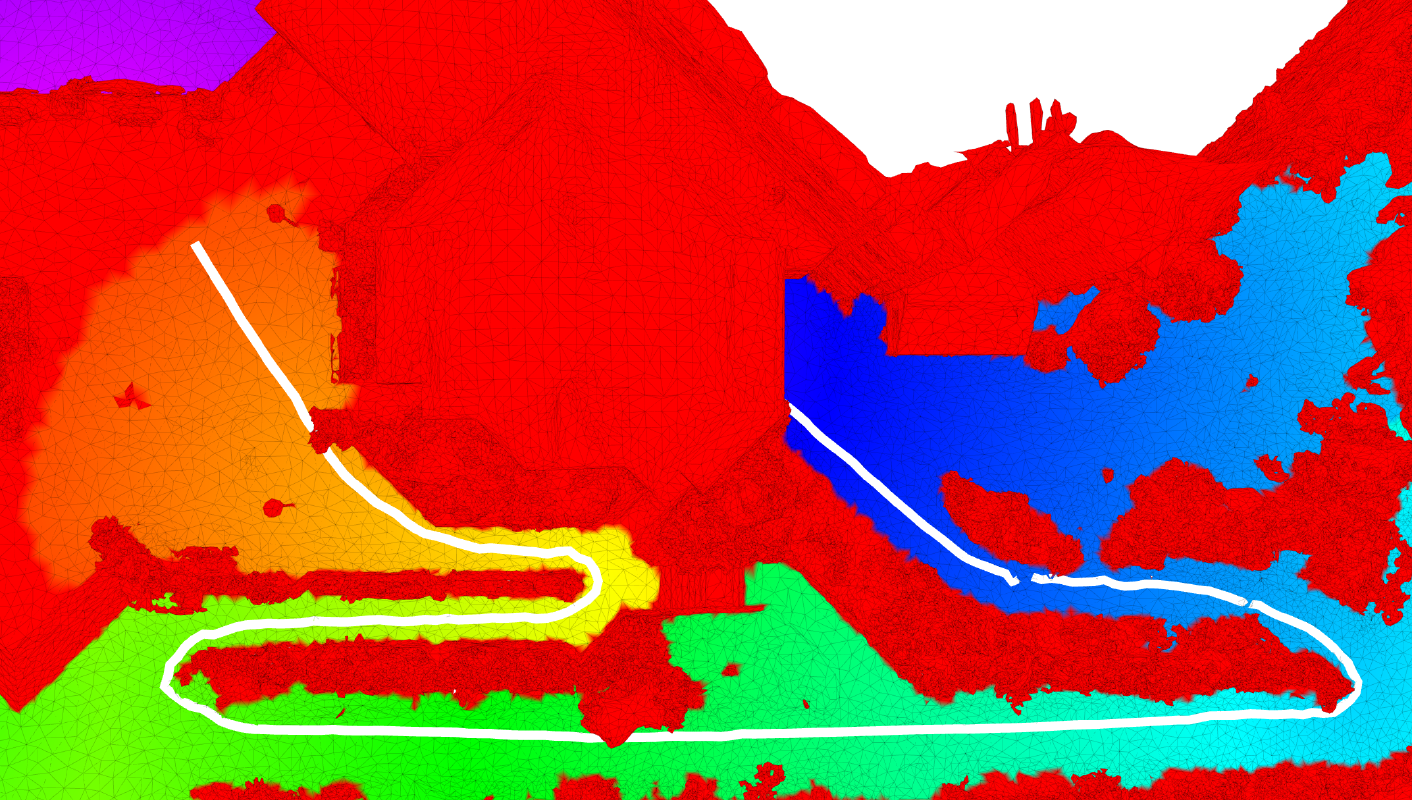
Universal Distance Computation
Exact distance computation in multi-level 3D envs.











