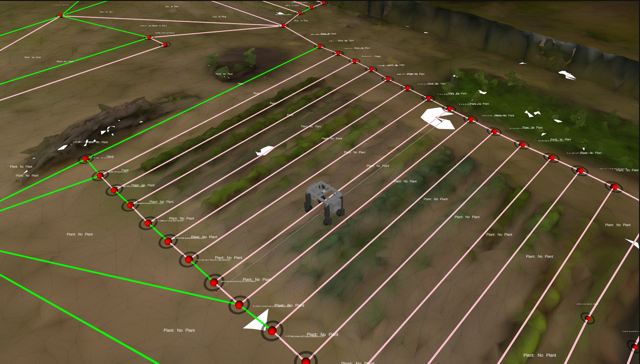
The system autonomously plans and controls the robot based on a network map (waypoint graph) that covers the field, garden or plantation to process the robot’s tasks.
The main components of a robust autonomous system are flexible navigation control, integration with higher-level tasks, and interaction with the environment.
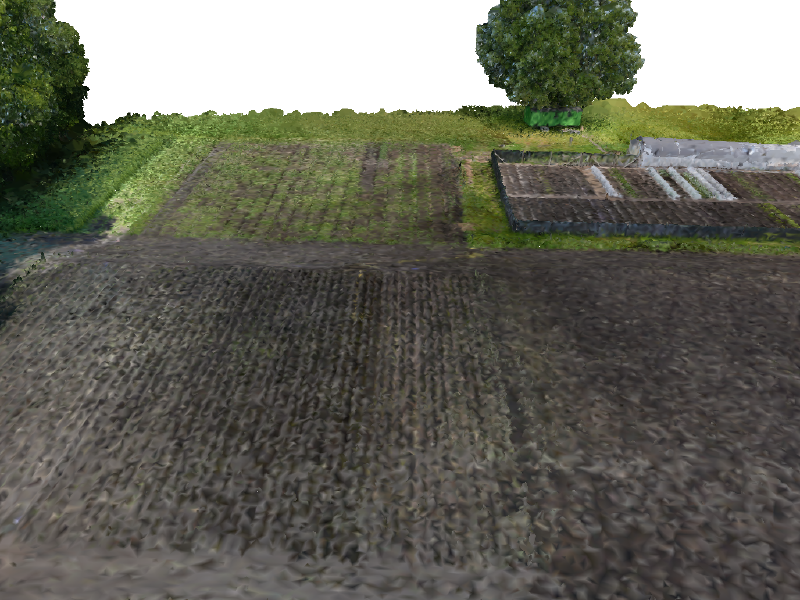
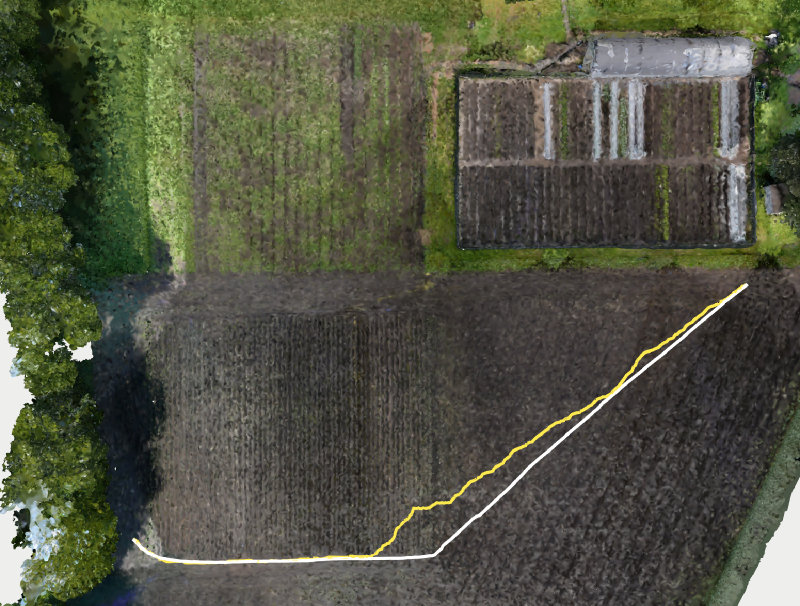
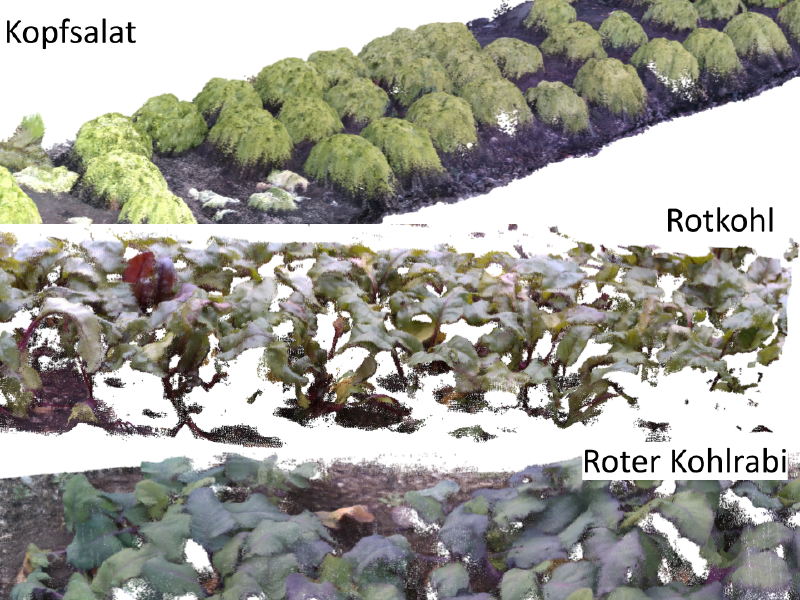
The creation of high-resolution and precise 3D environment maps and surface models serves e.g. as a basis for 3D mesh navigation, object surveying or ground truth.
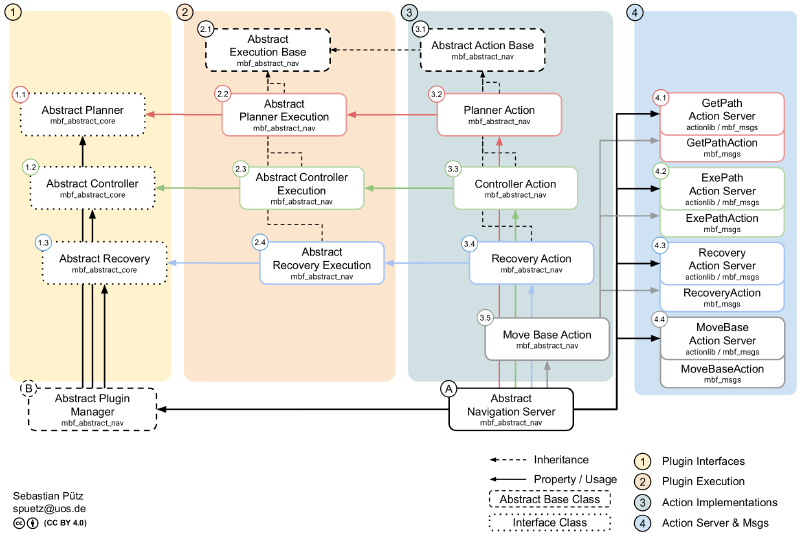
Autonomous 3D mesh navigation in rough terrain: We developed a new disrubtive surface mesh navigation technology made for universal navigation, e.g., in steep and multi-layered environments, such as in forests and through tunnels.
Automated 3D mapping of plants on the fly. Multiple calibrated sensors generate a high resolution plant map.
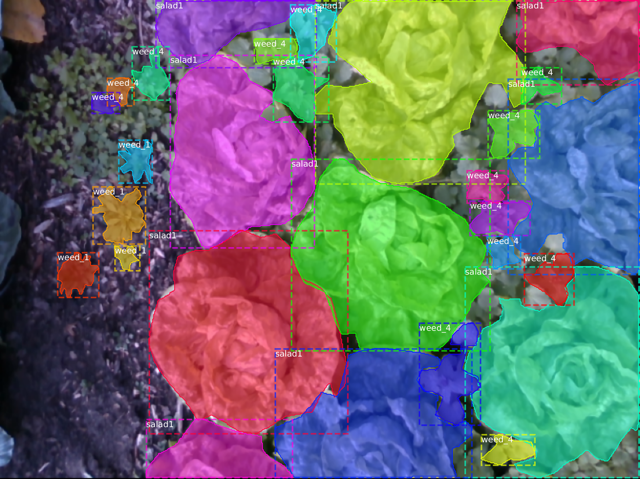
Automated segmentation of plants in images (2D) and based on point clouds (3D) allow plant-specific interaction with the environment (live or on-demand)