3D Mesh Navigation
3D Mesh Navigation


Autonome Roboter 3D Mesh-Navigation
Nature Robots ist auf autonome Roboter Navigation in semi- und unstrukturiertem Gelände abseits von gepflasterten Straßen spezialisiert. Mittels der von Nature Robots entwickelten geodätischen Wegplanungs- und Vektofeldansätzen können Roboter und Maschinen autonom auf dem Feld, Wiesen und im Wald sicher zu definierten Zielpositionen navigieren. Basierend auf einem 3D Umgebungs-Oberflächenmodell wird die Befahrbarkeit gezielt und Roboter-spezifisch abgeleitet, um den Roboter sicher zwischen Hindernissen entlang des kürzesten Weges über das berechnete Vektorfeld zu navigieren.
Der Roboter verortet bzw. lokalisiert sich dabei mithilfe aktuellster Raytracing-Ansätze zentimetergenau in der bekannten Karte, ohne dabei auf GPS oder RTK angewiesen zu sein. Kombiniert mit Positionsschätzungsansätzen (Odometrie und visuelle Odometrie) ist der Roboter während der Fahrt stets genau im 3D-Oberflächenmodell lokalisiert und kann so dem berechneten Vektorfeld oder Pfad folgen und umgebungsspezifische Aktionen planen und ausführen.
Die Vektorfeld-basierte Planung und Steuerung auf 3D-Oberflächenmodellen erlaubt die sichere Navigation in steilen, aber auch mehrschichtigen Umgebungen, wie z.B. über beliebig geformte Rampen, durch Tunnel, an Wänden und Decken - sofern der Roboter über die jeweils notwendige Aktorik verfügt. Mit herkömmlichen 2D-Raster-Planungsansätzen ist dies nicht oder nur unter erheblichem Aufwand möglich. Unser Vektorfeld-basierter Ansatz erlaubt es, kürzeste Wege-Vektorfelder für komplexe Outdoor-Umgebungen mit diversen Strukturen und Elementen in nur einem Planungslauf vollständig in unter einer Sekunde zur berechnen.
Zusammengefasst umfasst die autonome 3D Mesh-Navigation die folgenden Key-Features:
- Planbasierte Roboternavigation für raues, semi- und unstrukturiertes Gelände, wie z.B. Felder, Wiesen, Weinreben, oder Wälder.
- Vektorfeld-basierte Planung und Steuerung zu definierten Zielen in der 3D Oberflächenkarte unter Berücksichtigung nicht befahrbarer Hindernisse und Teile.
- Performante und vollständige Planung in komplexen Umgeben mit mehreren Ebenen und vertikalen oder Überhängenden Strukturen in nur einem Planungslauf.
- Hochpräzise Lokalisierung und Positionsschätzung im 3D Oberflächenmodell zur sicheren Navigation und ortsspezifischen Aktions Planung und Ausführung
Autonome 3D Mesh-Navigation in unwegsamem Gelände: Wir haben eine disrubtive universelle autonome Oberflächen-Navigation für steile und mehrstöckige Umgebungen entwickelt, z.B. für den Wald oder Tunnel.

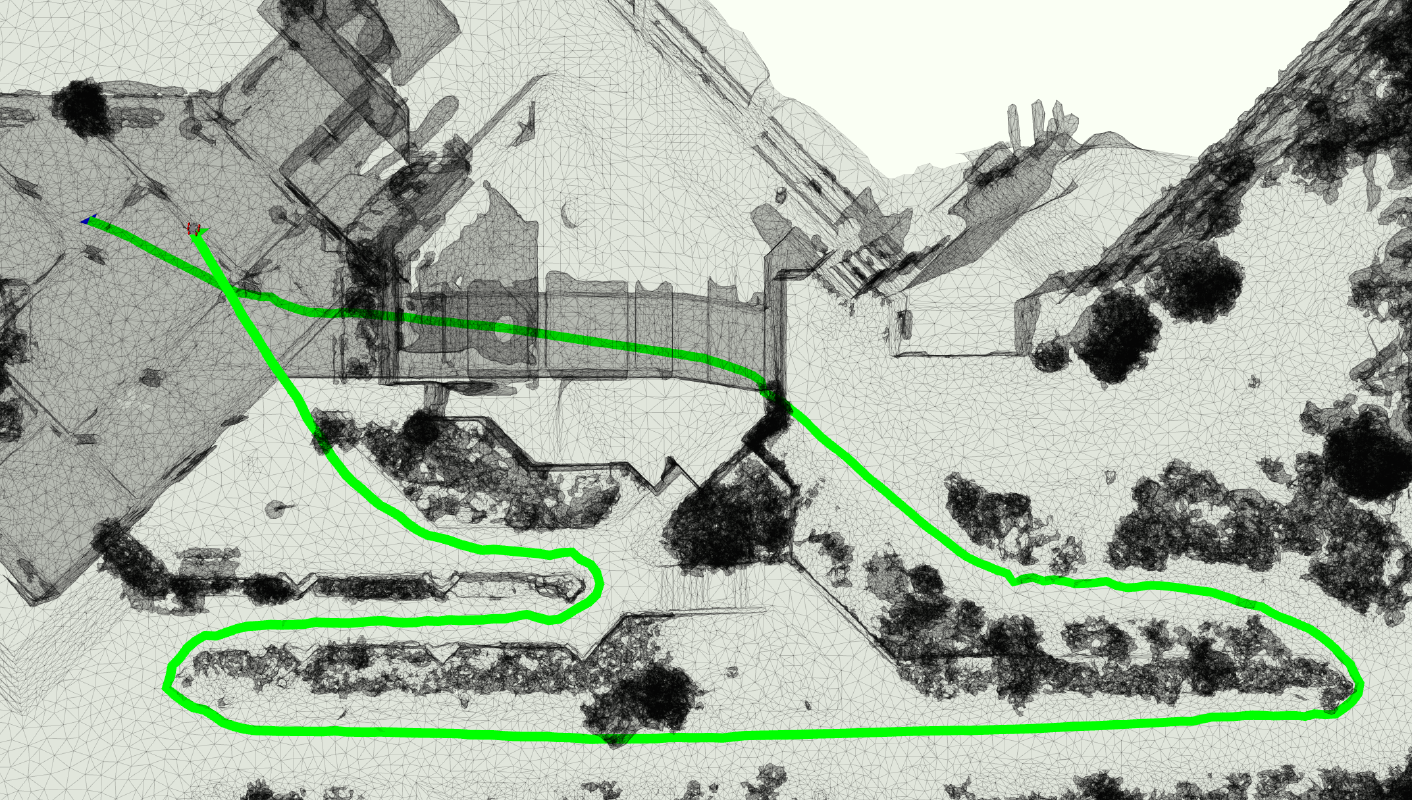
In Field Mesh Navigation
3D mesh path planning in agricultural fields.
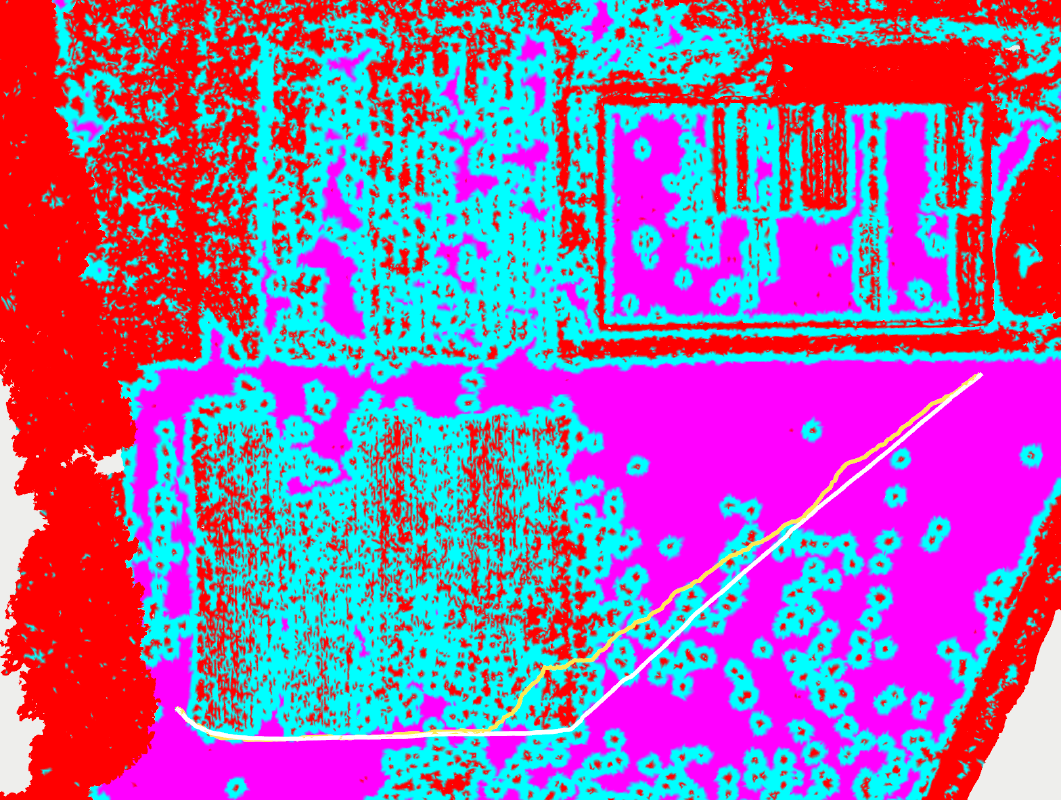
Drivability Estimation
Robot drivability estimation for save navigation.
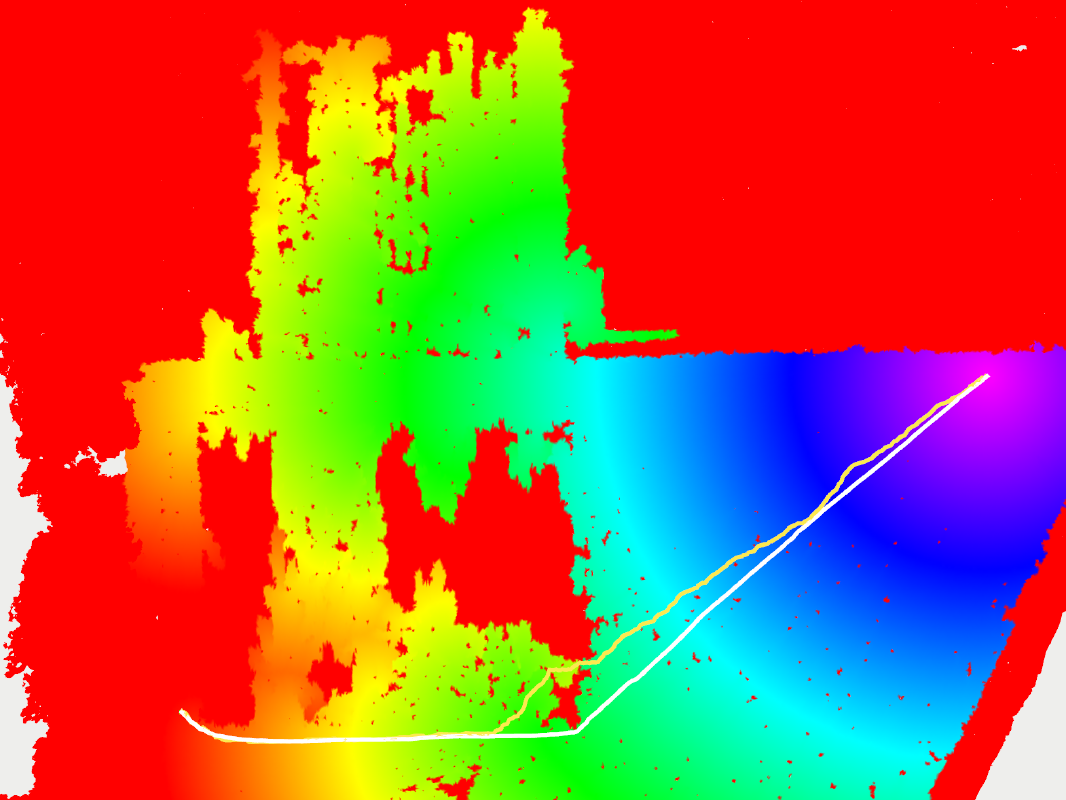
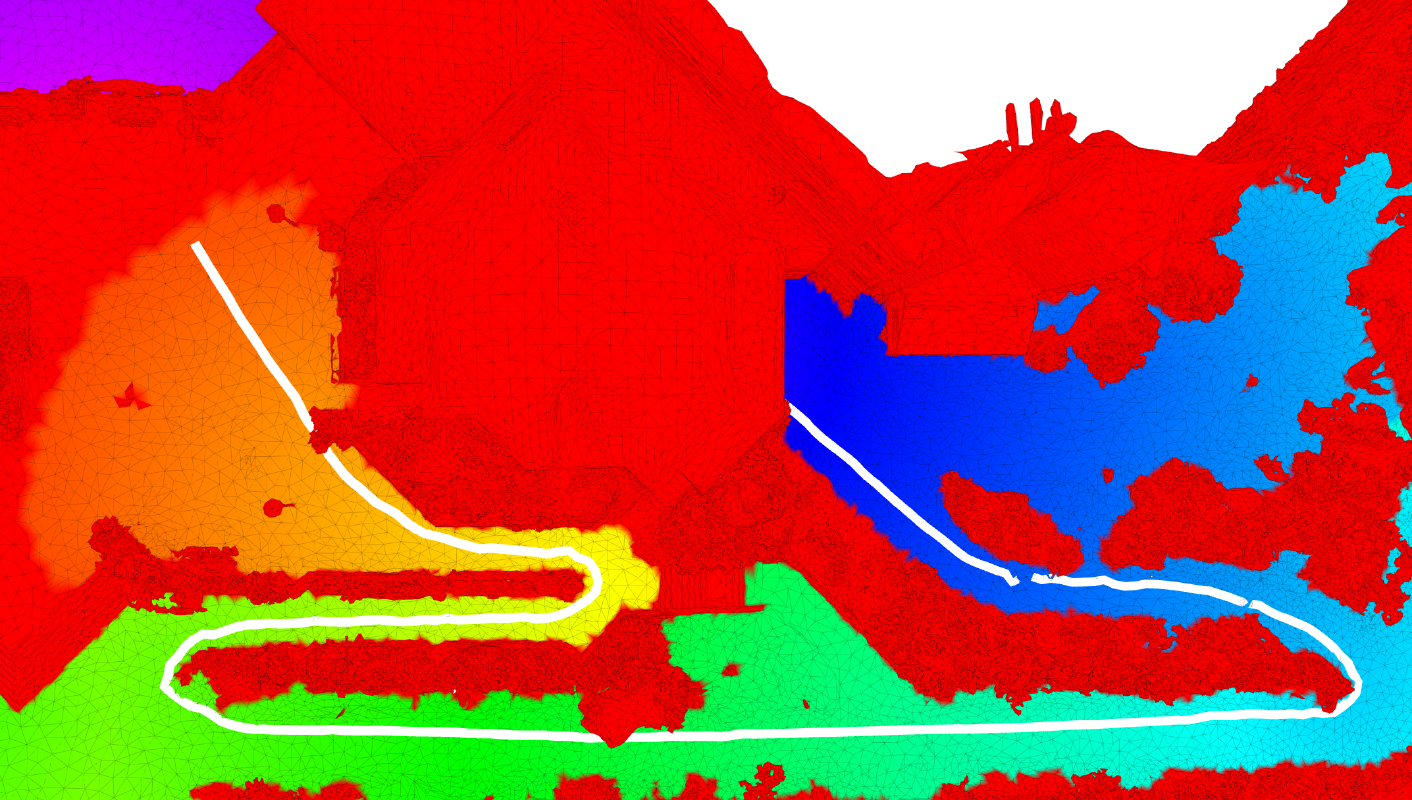
Distance Field Computation
Exact metric distance field computation to the goal.
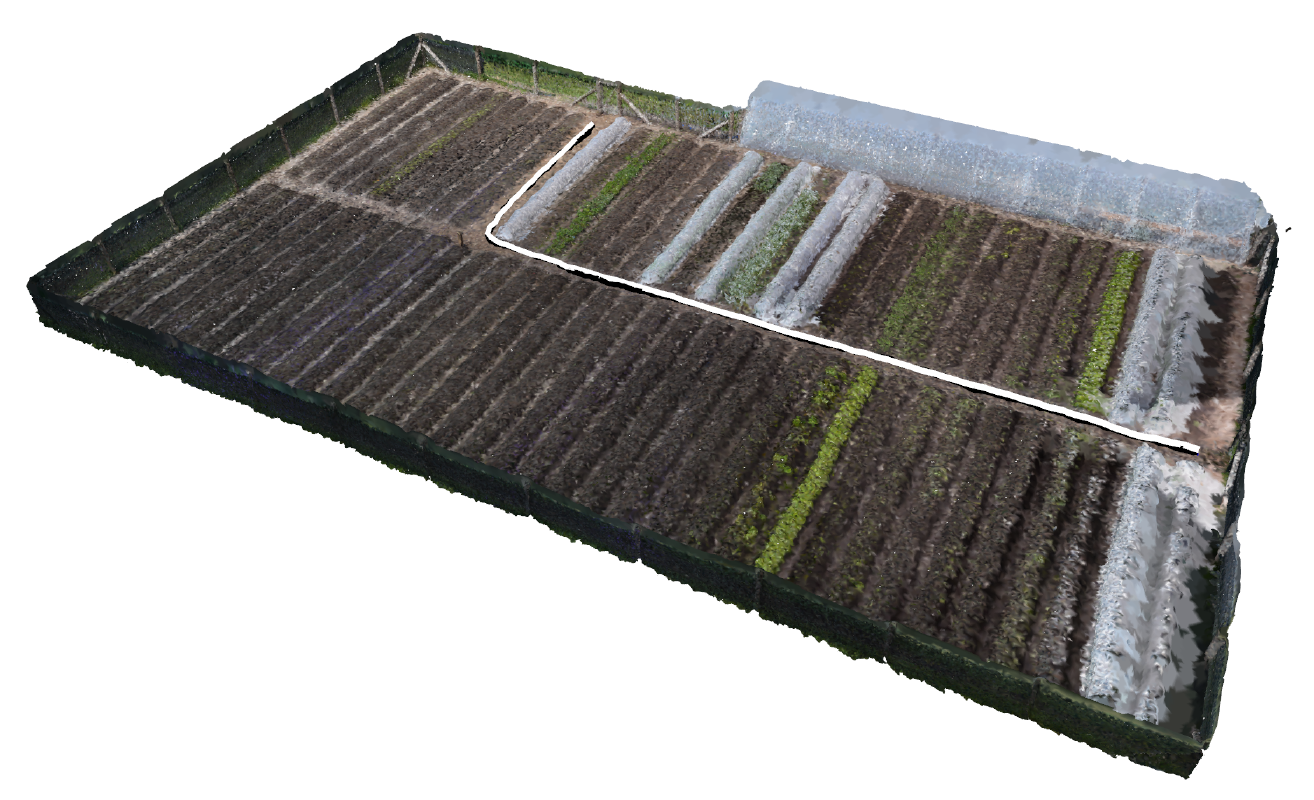
In Garden Mesh Navigation
3D mesh path planning in a market garden.
3D Urban Multi-Level Path Planning
Multi-level planning over ramps and through tunnels.
Universal Distance Computation
Exact distance computation in multi-level 3D envs.










