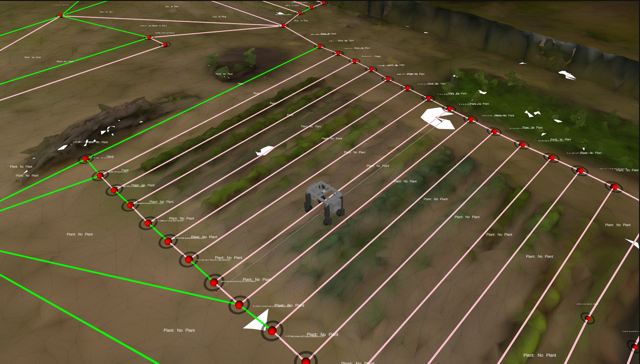
Das System plant und steuert den Roboter autonom anhand einer Netzkarte (Wegpunkt Graph), die das Feld, den Garten oder die Plantage abdeckt, um die Aufgaben des Roboters abzuarbeiten.
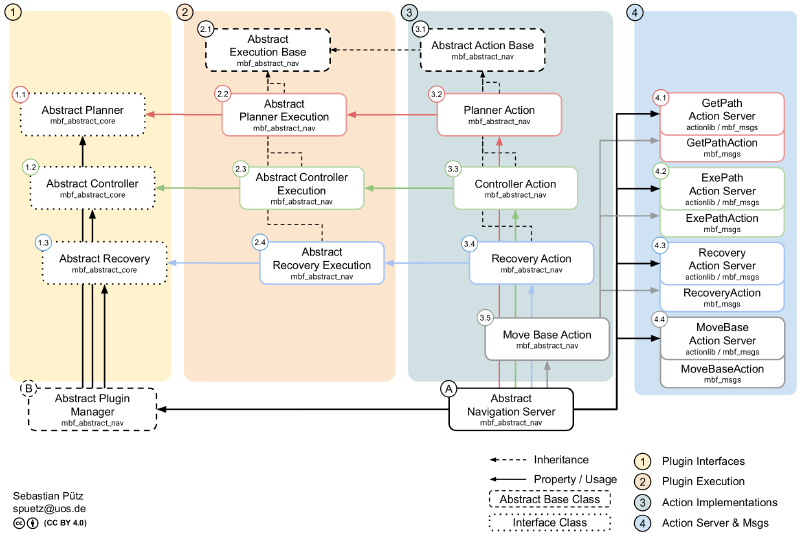
Die Hauptbestandteile eines robusten autonomen Systems sind eine flexible Navigationssteuerung, die Integration in übergeordnete Aufgaben sowie die Interaktion mit der Umgebung.
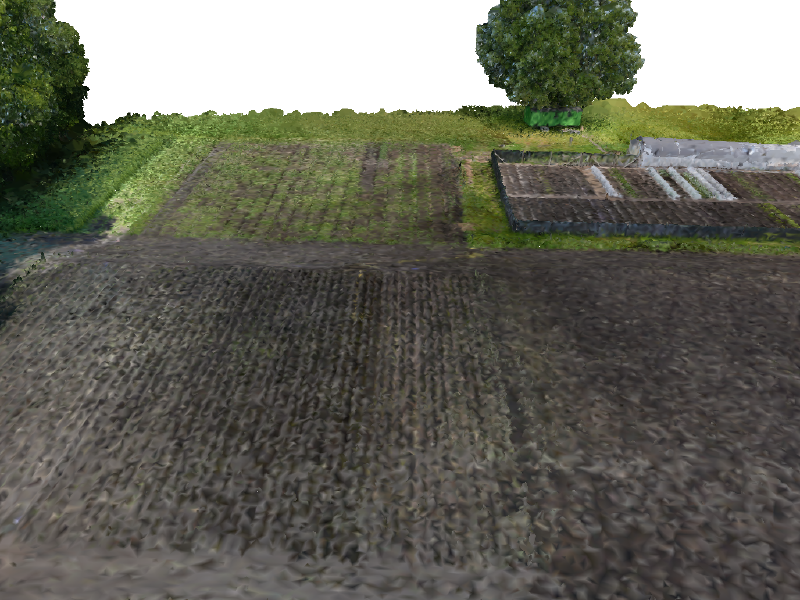
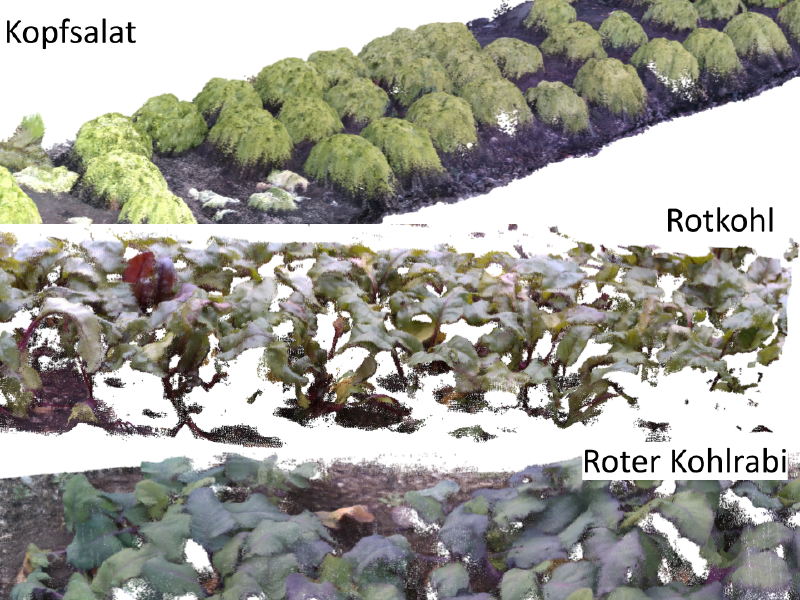
Die Erstellung von hochauflösenden und präzisen 3D Umgebungskarten und Oberflächenmodellen dient z.B. als Grundlage für die 3D Mesh Navigation, Objekt-Vermessung oder Ground Truth.
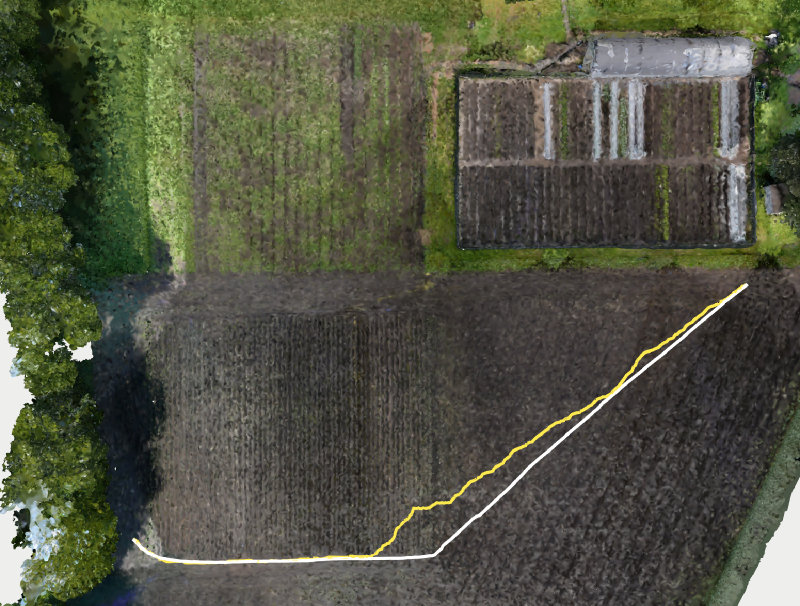
Autonome 3D Mesh-Navigation in unwegsamem Gelände: Wir haben eine disrubtive universelle autonome Oberflächen-Navigation für steile und mehrstöckige Umgebungen entwickelt, z.B. für den Wald oder Tunnel.
Automatische 3D-Kartierung von Pflanzen während der Fahrt. Mehrere kalibrierte Sensoren generieren eine hochauflösende Pflanzenkarte.
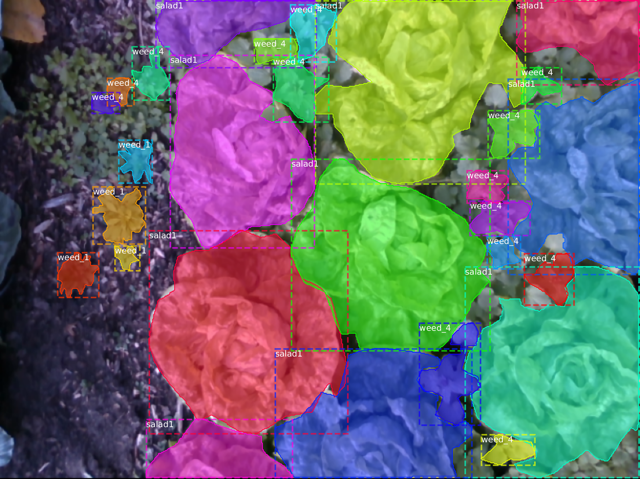
Automatische Segmentierung von Pflanzen in Bildern (2D) und basierend auf Punktwolken (3D) erlauben die pflanzenspezifische Interaktion mit der Umgebung (live oder on-demand)